Bayesian Spatial Kernel Smoothing for ScalableDense Semantic Mapping
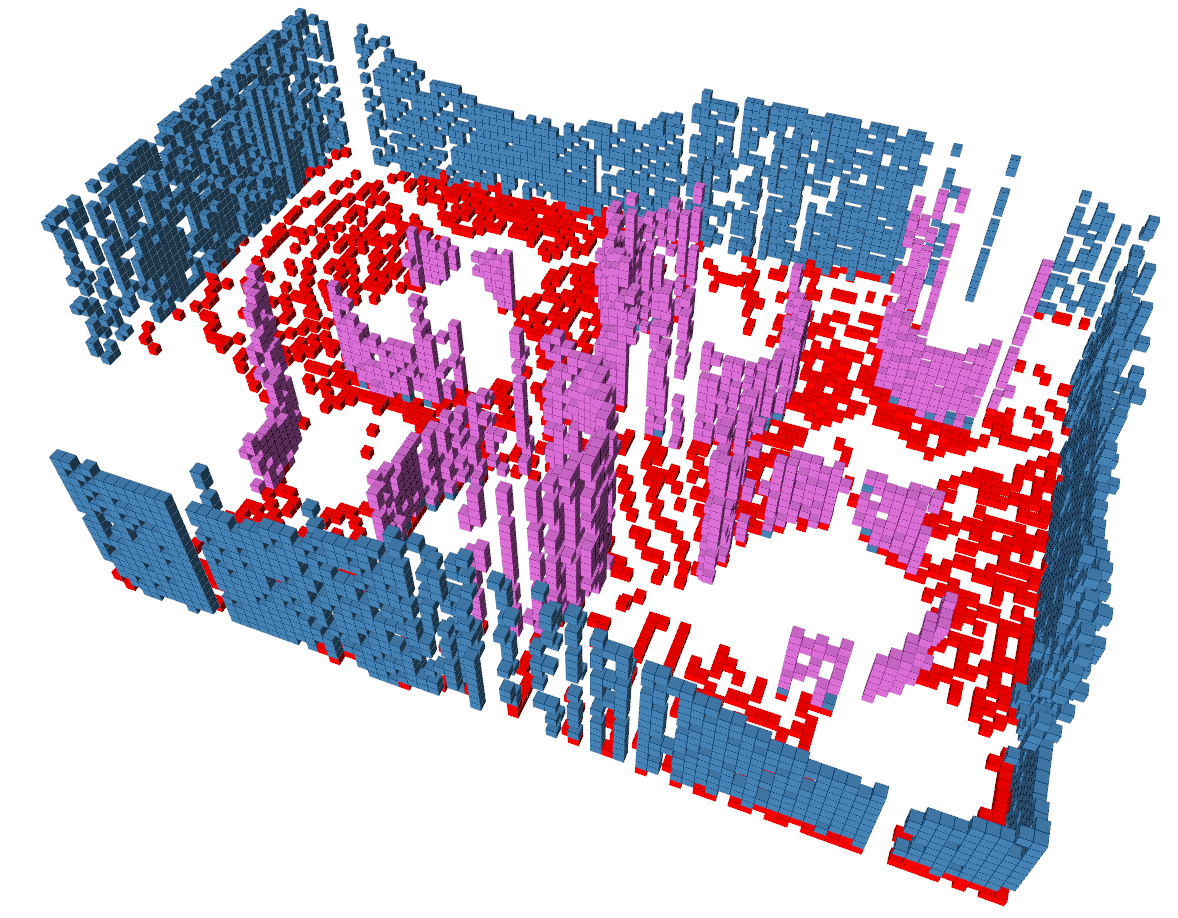
This paper develops a Bayesian continuous 3D semantic occupancy map from noisy point cloud measurements. In particular, we generalize the Bayesian kernel inference model for occupancy (binary) map building to semantic (multi-class) maps. The method nicely reverts to the original occupancy mapping framework when only one occupied class exists in obtained measurements. First, using Categorical likelihood and its conjugate prior distribution, we extend the counting sensor model for binary classification to a multi-class classification problem which results in a unified probabilistic model for both occupancy and semantic probabilities. Secondly, by applying a Bayesian spatial kernel inference to the semantic counting sensor model, we relax the independent grid assumption and bring smoothness and continuity to the map inference. These latter properties enable the method to exploit local correlations present in the environment to predict semantic probabilities in regions unobserved by the sensor while increasing the performance. Lastly, computational efficiency and scalability are achieved by leveraging sparse kernels and a test-data octrees data structure. The evaluations using multiple sequences of stereo camera and LiDAR datasets show that the proposed method consistently outperforms the compared baselines. We also present a qualitative evaluation using data collected by a biped robot platform on the University of Michigan - North Campus.
PDF Abstract KITTI
KITTI
 SemanticKITTI
SemanticKITTI
 NCLT
NCLT
