Bagging Regional Classification Activation Maps for Weakly Supervised Object Localization
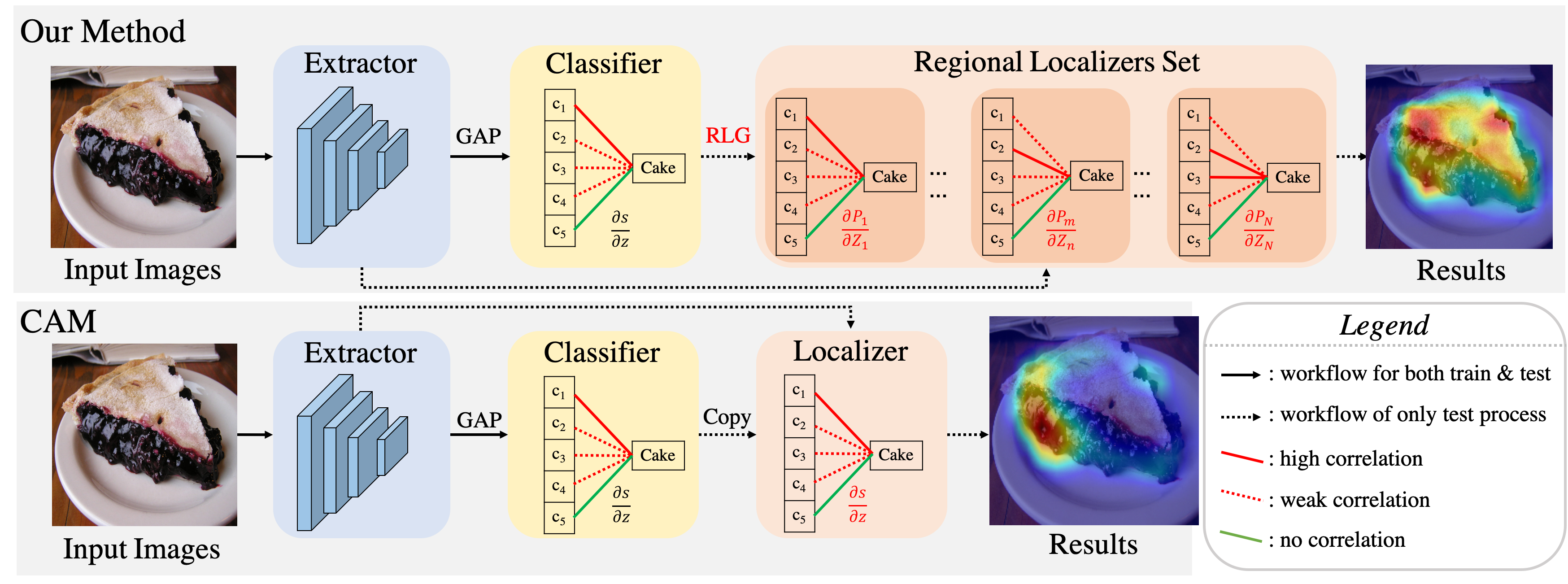
Classification activation map (CAM), utilizing the classification structure to generate pixel-wise localization maps, is a crucial mechanism for weakly supervised object localization (WSOL). However, CAM directly uses the classifier trained on image-level features to locate objects, making it prefers to discern global discriminative factors rather than regional object cues. Thus only the discriminative locations are activated when feeding pixel-level features into this classifier. To solve this issue, this paper elaborates a plug-and-play mechanism called BagCAMs to better project a well-trained classifier for the localization task without refining or re-training the baseline structure. Our BagCAMs adopts a proposed regional localizer generation (RLG) strategy to define a set of regional localizers and then derive them from a well-trained classifier. These regional localizers can be viewed as the base learner that only discerns region-wise object factors for localization tasks, and their results can be effectively weighted by our BagCAMs to form the final localization map. Experiments indicate that adopting our proposed BagCAMs can improve the performance of baseline WSOL methods to a great extent and obtains state-of-the-art performance on three WSOL benchmarks. Code are released at https://github.com/zh460045050/BagCAMs.
PDF Abstract

 CUB-200-2011
CUB-200-2011
