A perception centred self-driving system without HD Maps
Building a fully autonomous self-driving system has been discussed for more than 20 years yet remains unsolved. Previous systems have limited ability to scale. Their localization subsystem needs labor-intensive map recording for running in a new area, and the accuracy decreases after the changes occur in the environment. In this paper, a new localization method is proposed to solve the scalability problems, with a new method for detecting and making sense of diverse traffic lines. Like the way human drives, a self-driving system should not rely on an exact position to travel in most scenarios. As a result, without HD Maps, GPS or IMU, the proposed localization subsystem relies only on detecting driving-related features around (like lane lines, stop lines, and merging lane lines). For spotting and reasoning all these features, a new line detector is proposed and tested against multiple datasets.
PDF Abstract Cityscapes
Cityscapes
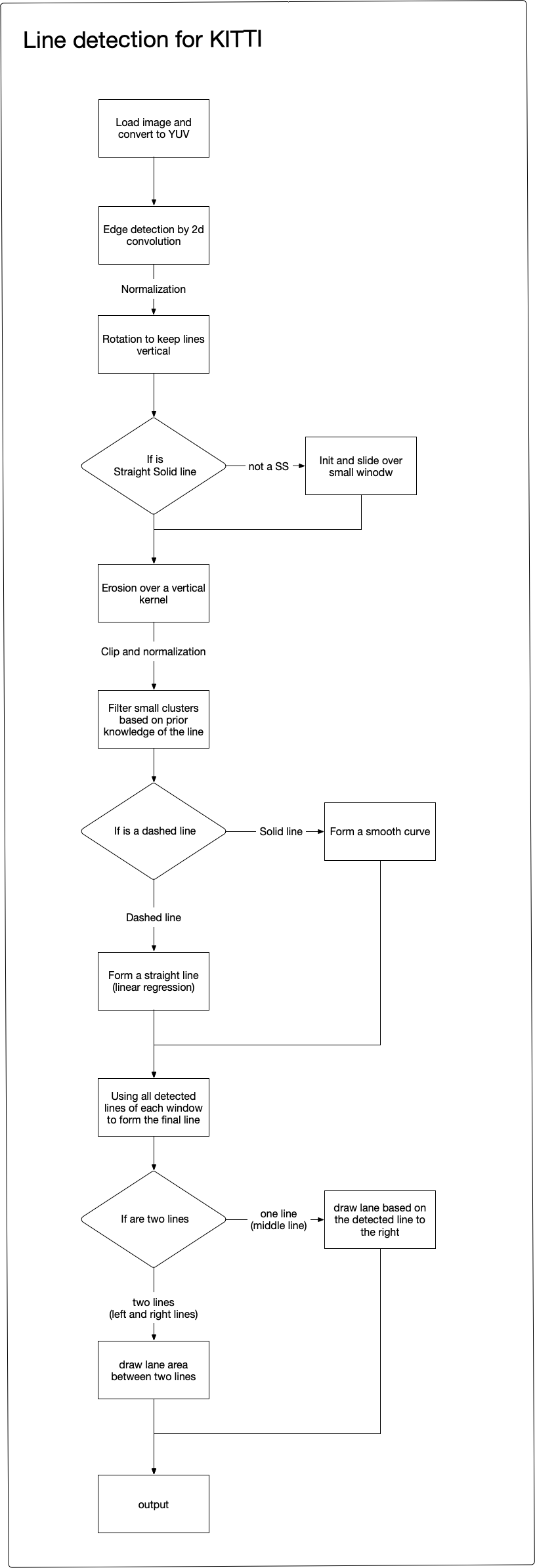
 KITTI
KITTI
