Interactive Gibson Environment
Introduced by Xia et al. in Interactive Gibson Benchmark (iGibson 0.5): A Benchmark for Interactive Navigation in Cluttered Environments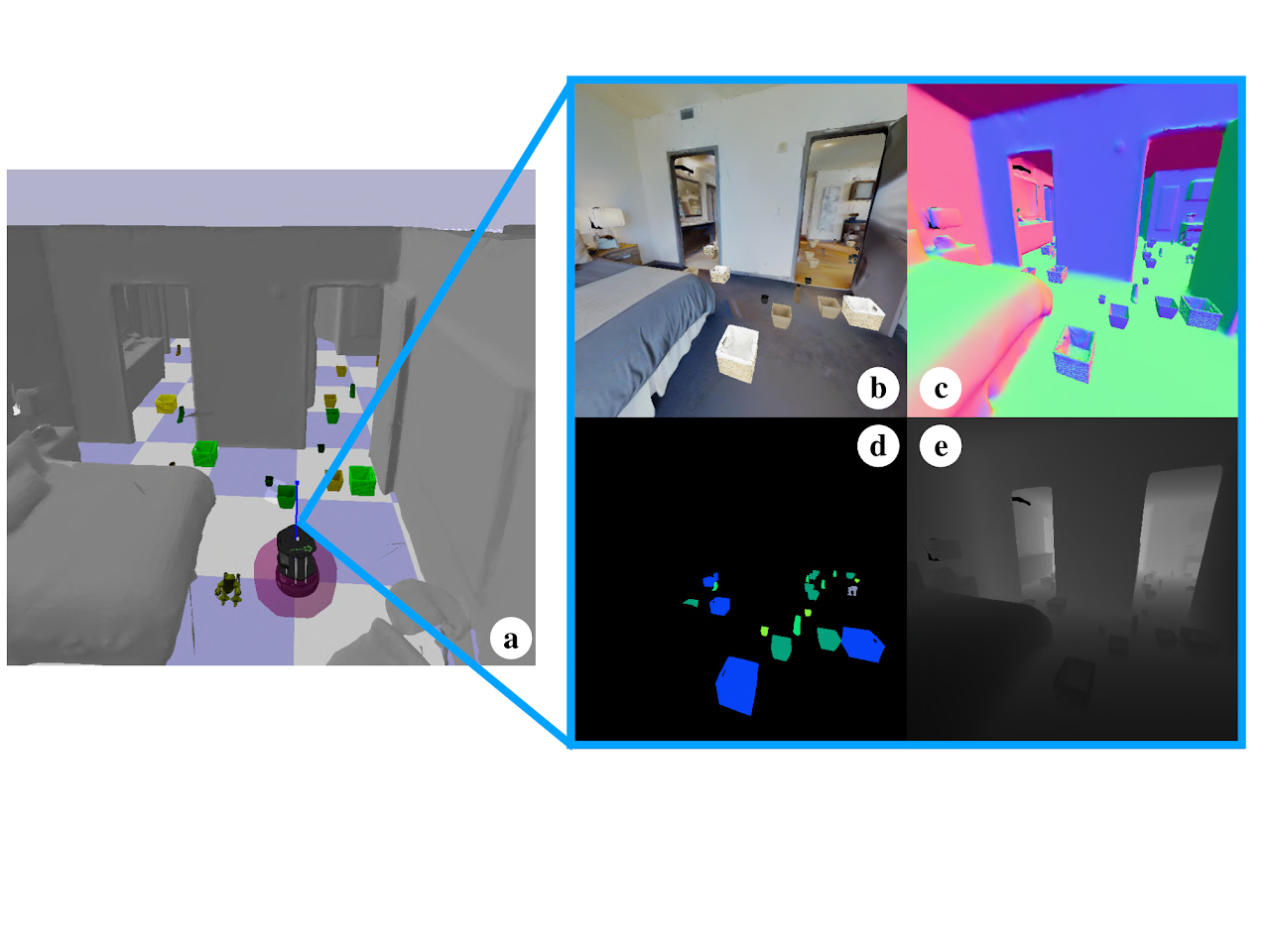
Interactive Gibson is a comprehensive benchmark for training and evaluating Interactive Navigation: robot navigation strategies where physical interaction with objects is allowed and even encouraged to accomplish a task. The benchmark has two main components:
- The Interactive Gibson Environment, which simulates high fidelity visuals of indoor scenes, and high fidelity physical dynamics of the robot and common objects found in these scenes.
- set of Interactive Navigation metrics which allows one to study the interplay between navigation and physical simulation.
Papers
| Paper | Code | Results | Date | Stars |
|---|
Dataset Loaders
No data loaders found. You can
submit your data loader here.
No data loaders found. You can
submit your data loader here.
